Line Follower Robot - Robotics Space Exploration Competition
This robot was my (first place winning!) submission in the 2023 Robotics Space Exploration (RSX) Space Exploration Engineering Kompetition (SEEK) hackathon. In a team of four, we were given a limited amount of time, a limited set of components and wires, and tasked with building the fastest line follower robot that we could.
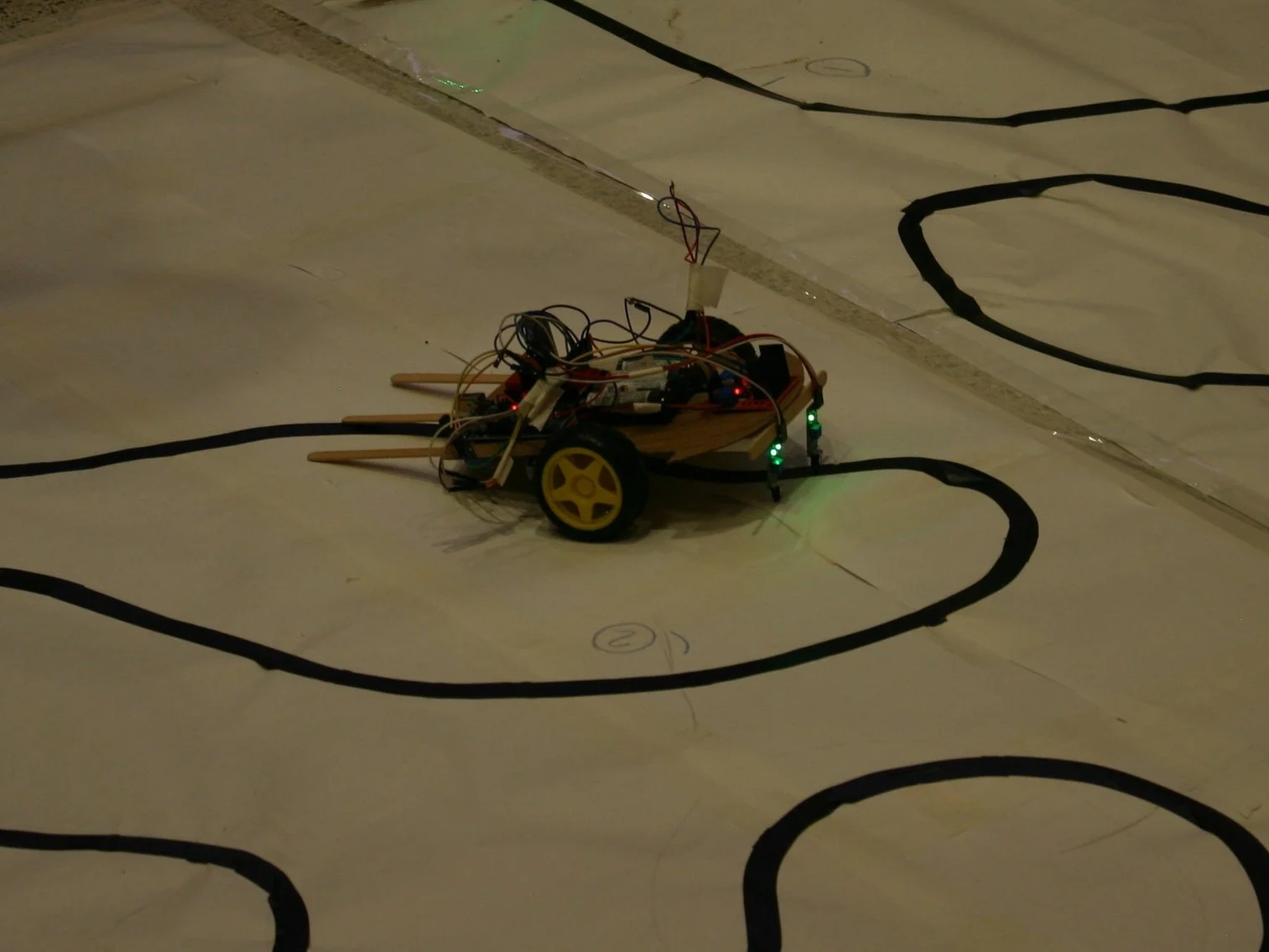
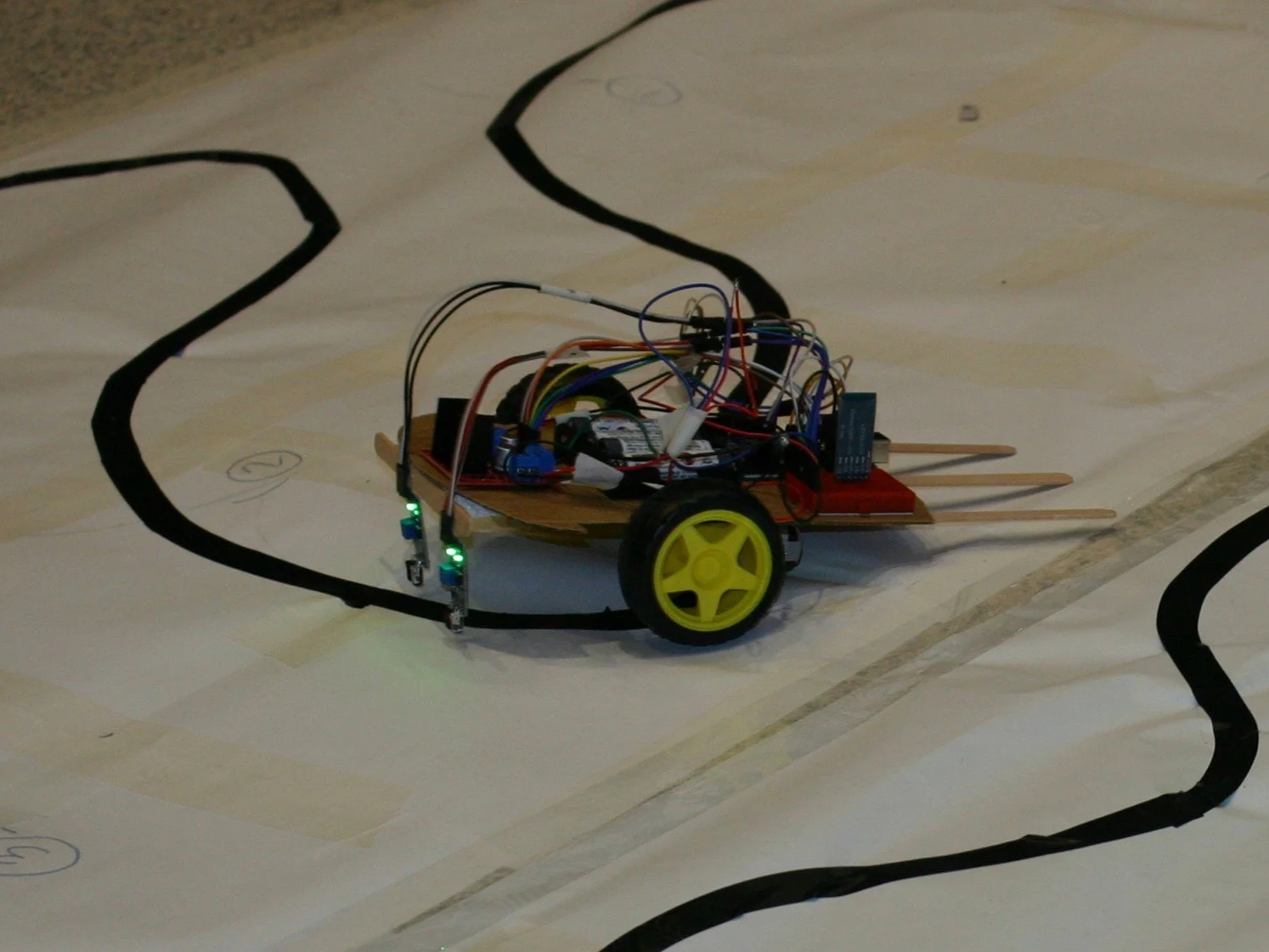
Our design featured an IR sensor positioned on each side of the line and used a dual H-bridge motor driver to control our two motors. We implemented bang-bang control on an Arduino Uno and spent a lot of time tuning all of the parameters. The rover’s performance varied a lot with minor changes in the RPM of the motors, the angle of the IR sensors with respect to the ground, and the position of the breadboard on the cardboard chassis. In my opinion, this was the most instructive part of the design process for this project.
In the end, our rover consistently finished the race course faster than all of its competitors by a wide margin. If you’re interested, there’s a clip of it making its way through part of the track during the finals round.